Aksiyonlar
Özellik #21
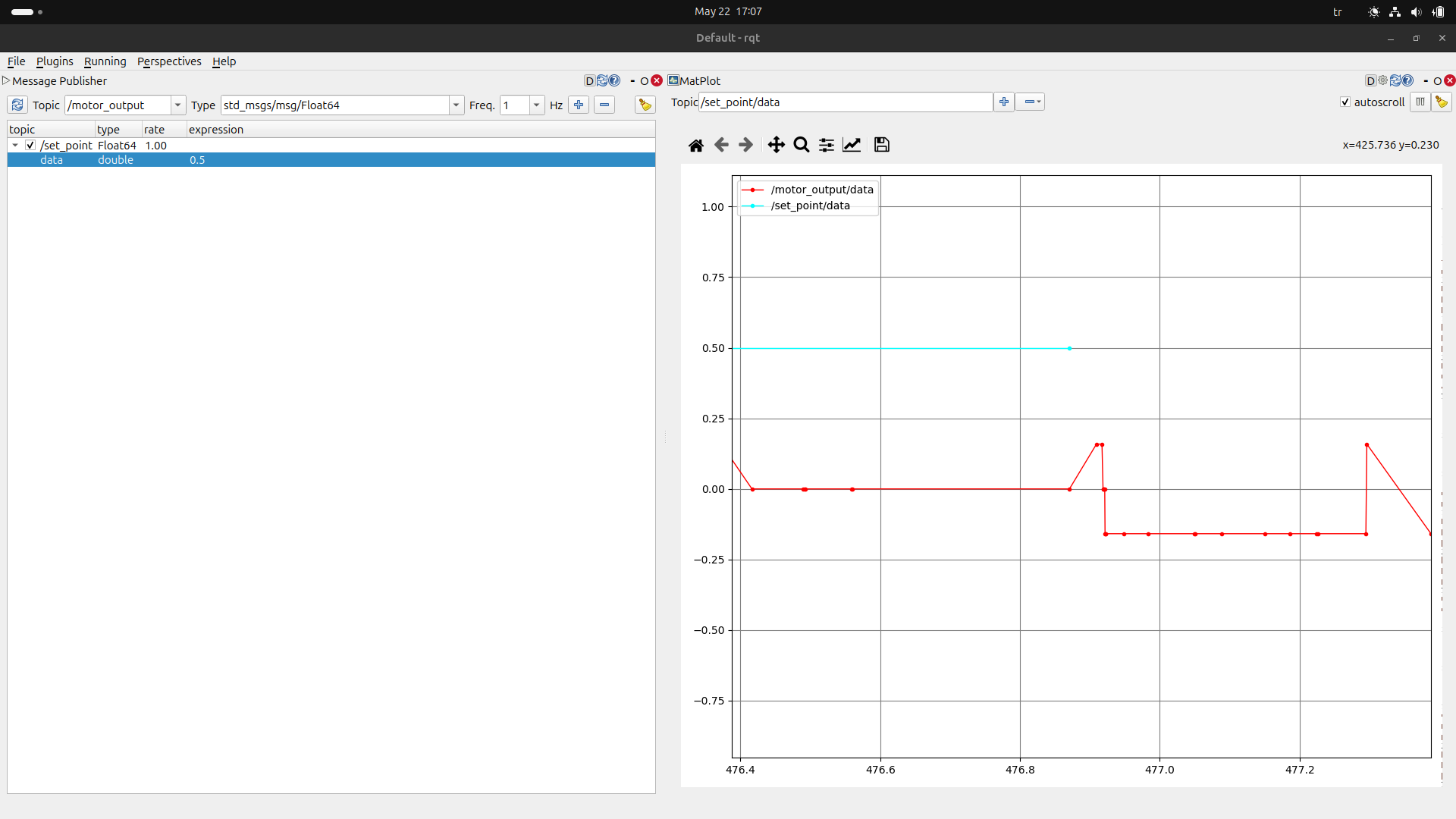
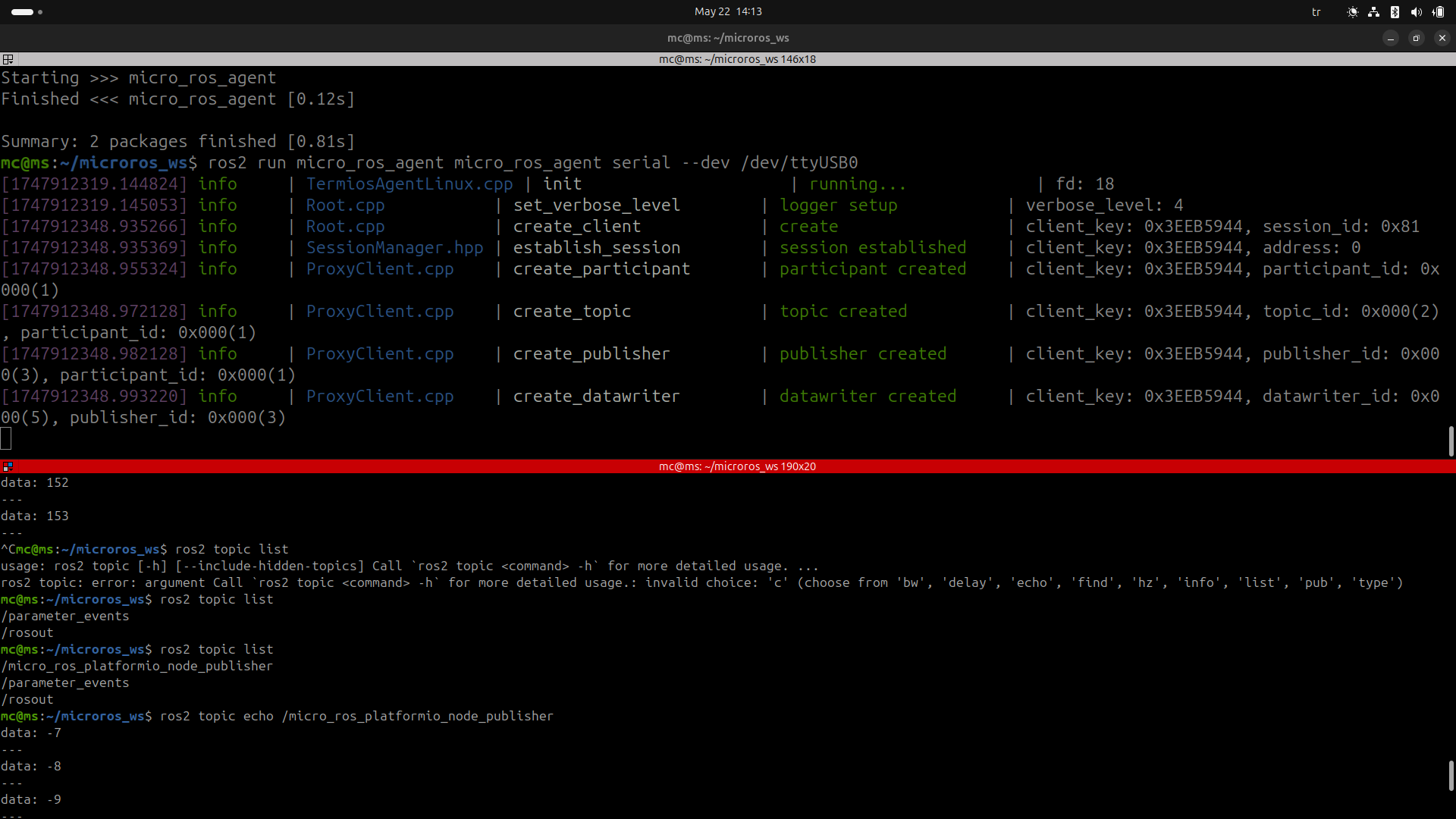
açıkROS - Lidar, Motor sürücüler, IMU ve diğer sensörlerin Entegrasyonu
Başlangıç Tarihi:
29.04.2025
Bitiş Tarihi:
31.05.2025 (yaklaşık 9 ay geç)
Tamamlanma yüzdesi:
20%
Kalan zaman:
Dosyalar
{kind=link}
{kind=link}
Aksiyonlar
20%
Dosyalar