Aksiyonlar
Özellik #21
açıkROS - Lidar, Motor sürücüler, IMU ve diğer sensörlerin Entegrasyonu
Başlangıç Tarihi:
29.04.2025
Bitiş Tarihi:
31.05.2025 (yaklaşık 9 ay geç)
Tamamlanma yüzdesi:
20%
Kalan zaman:
Dosyalar
{kind=link}
{kind=link}
Aksiyonlar
#1
Abdurrahman Dincer tarafından 10 ay önce güncellendi
BNO055 modulu ayarlandi, https://github.com/dheera/ros-imu-bno055 ve https://github.com/joeyjyyang/ros_bno055?tab=readme-ov-file adresinden referans alindi.
raspberry pi lerin i2c tarafinda sorun yasattigi, iki yontemle bi sorunun ustesinden gelinebildigi yaziyor. Bu yontemler baglanti yapildiktan sonra denenecek
Simdi motus da kullanilan bno055 modulleri cikartildi ve montaji yapilip denenecek
Aksiyonlar
#3
Muhammed Seyyid tarafından 10 ay önce güncellendi
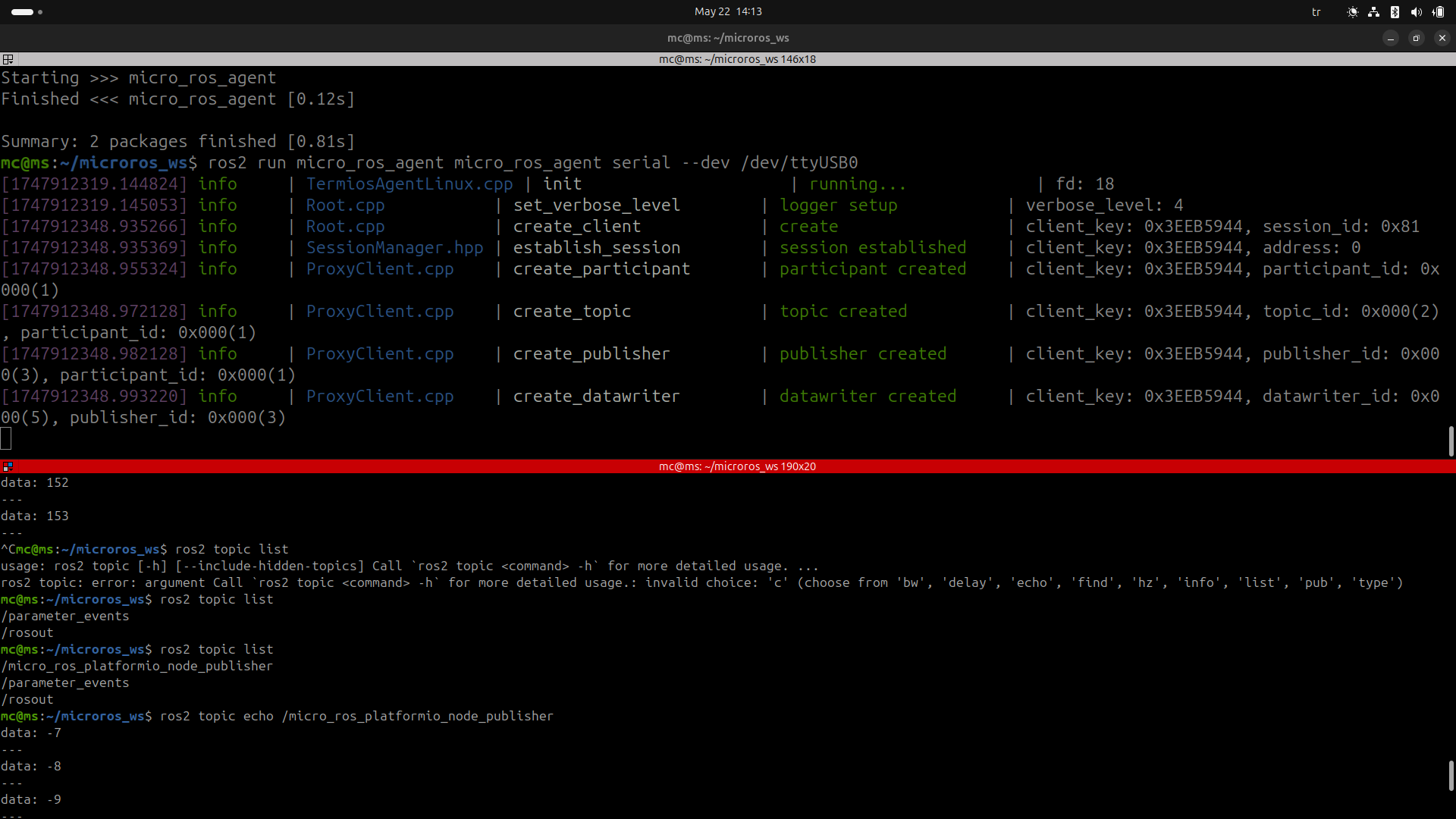
- Dosya Screenshot from 2025-05-22 14-13-10.png Screenshot from 2025-05-22 14-13-10.png eklendi
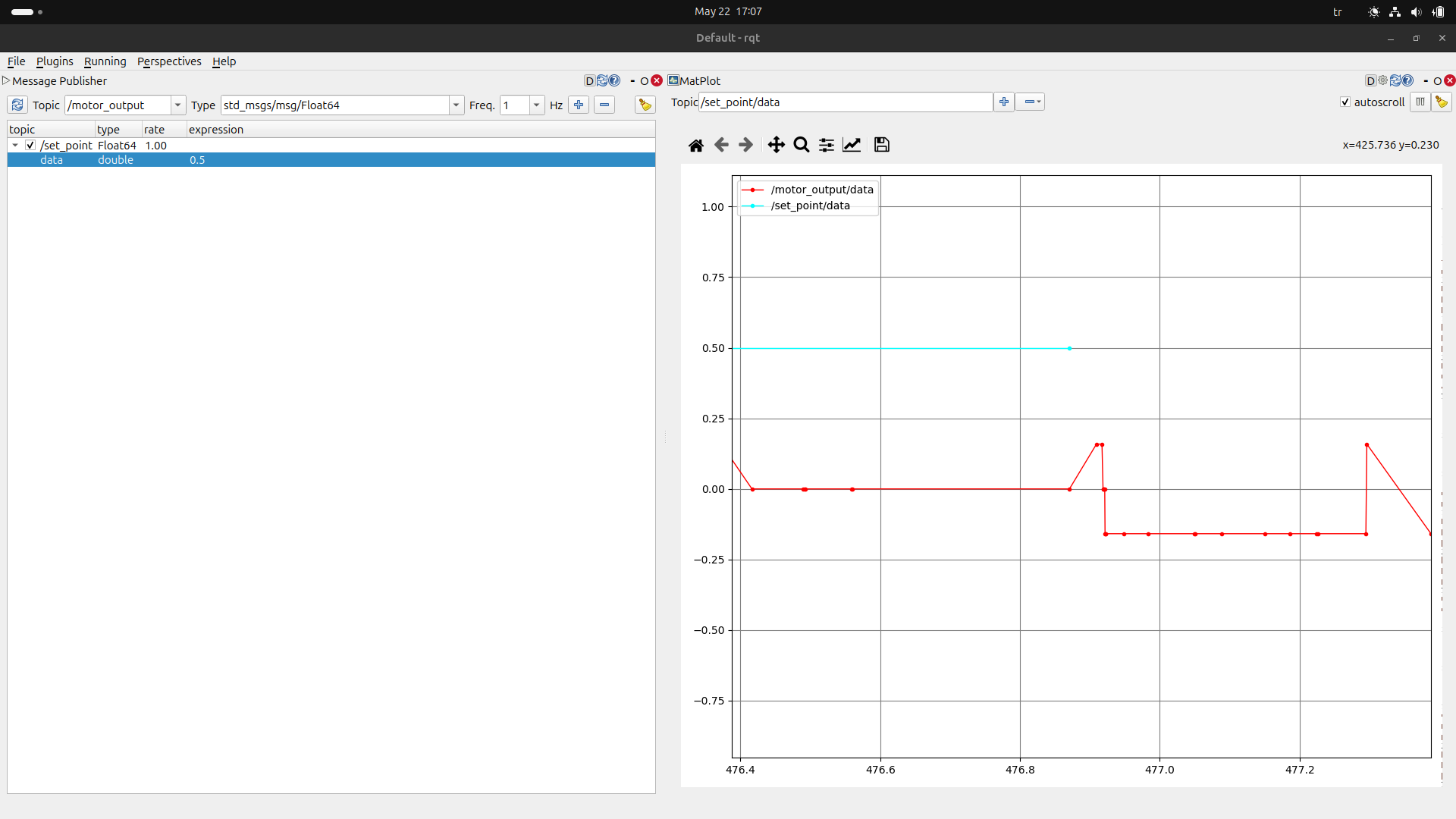
- Dosya Screenshot from 2025-05-22 17-07-11.png Screenshot from 2025-05-22 17-07-11.png eklendi
- Tamamlanma yüzdesi: 0 -> 20
Motor sürücülerinin genel araştırması ve ros2 de çalışabilmesi için çalışmaları ve uyguylamaları ekip arkadaşlarımla yaptık , motorun (hız ve enkoder) rosta ilk testlerini gerçekleştirdik .
Aksiyonlar