Özellik #24
açıkRos - Solidden gelen gerçek tasarım, fiziksel ölçü ve hatlarının sisteme işlenesi
90%
Dosyalar
{kind=link}
{kind=link}
Muhammed Seyyid tarafından 10 ay önce güncellendi
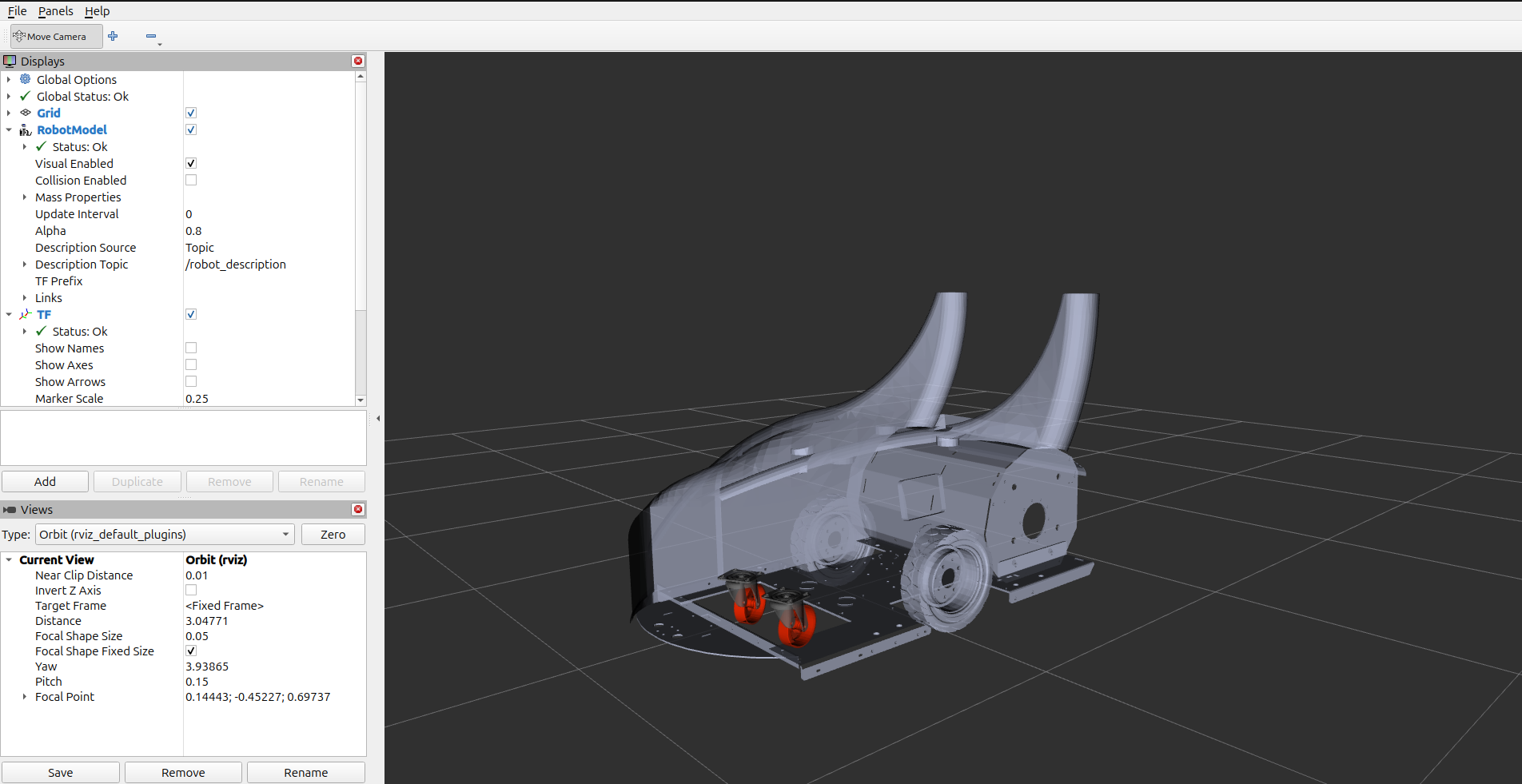
- Dosya Screenshot from 2025-05-06 10-41-55.png Screenshot from 2025-05-06 10-41-55.png eklendi
- Durum: Yeni -> Yapılıyor
- Tamamlanma yüzdesi: 0 -> 60
Solid programından urdf olarak çalıştırabilmemiz için gerekli noktaları koordinatları eksenleri ekledik robot teker hareketini test ettik , gelen ros dosyasını ros1 den ros2 ye uyarladım , görüntüde rviz2 deki robotun tasarım , gazeboda çalışabilmesi için gerekli düzenlemeleri yapmaktayım.
Muhammed Seyyid tarafından 10 ay önce güncellendi
Solid programından urdf olarak çalıştırabilmemiz için gerekli noktaları koordinatları eksenleri ekledik robot teker hareketini test ettik , gelen urdf dosyasını ros1 den ros2 ye uyarladım , görüntüde rviz2 de robotun tasarımını test ettim , gazeboda çalışabilmesi için gerekli düzenlemeleri yapmaktayım.
Muhammed Seyyid tarafından 10 ay önce güncellendi
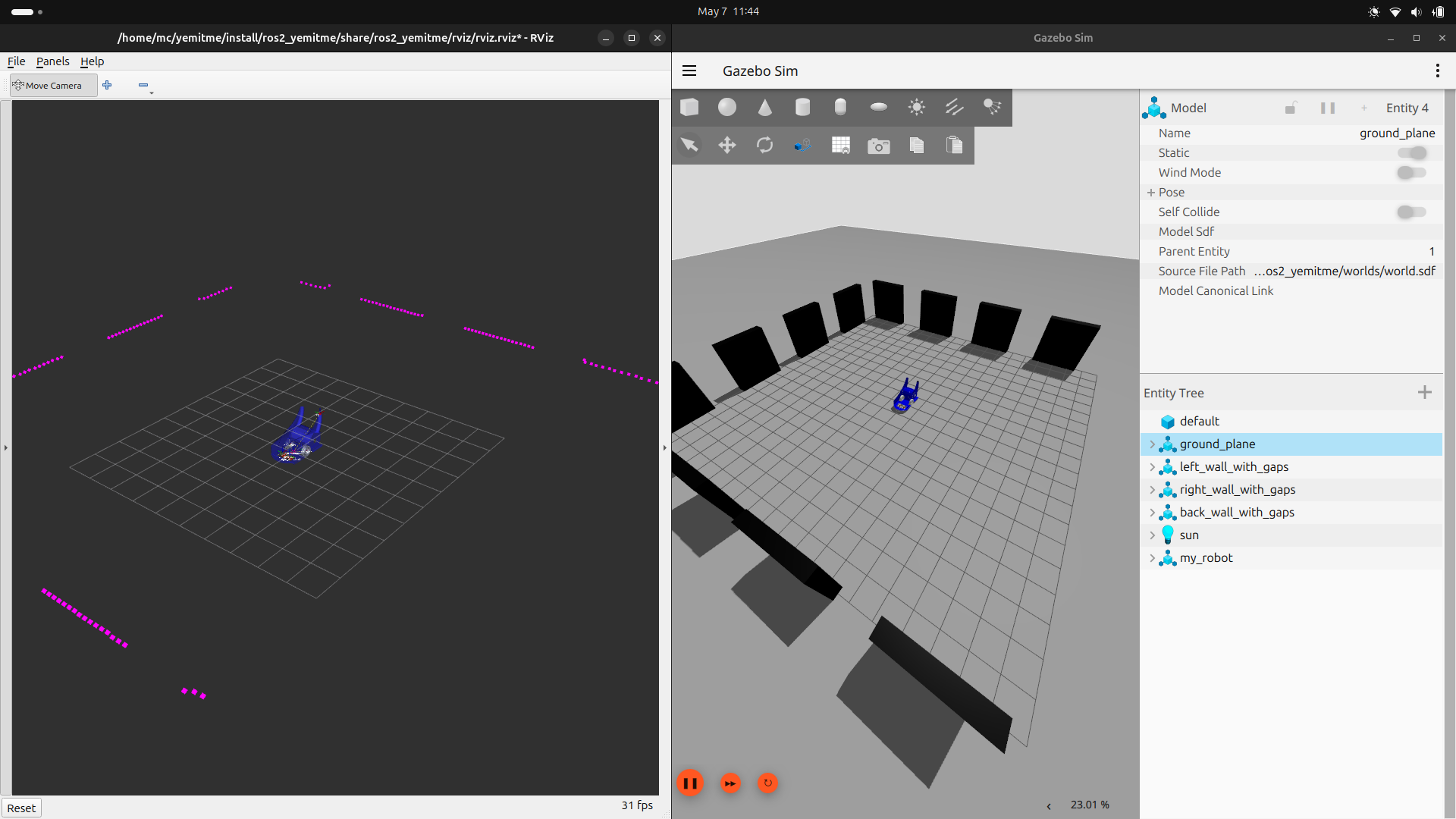
- Dosya Screenshot from 2025-05-07 11-44-29.png Screenshot from 2025-05-07 11-44-29.png eklendi
- Tamamlanma yüzdesi: 60 -> 70
Gazebo ortamında robotun çalışabilmesi için gerekli düzenlemeleri yaptım urdf ve launch dosyalarını oluşturdum robotun hareket testini yaptım.
haritalndırma ve yerelleştirme aşaması için tasarıma lidar ekledim ve test ettim.
Muhammed Seyyid tarafından 10 ay önce güncellendi
- Tamamlanma yüzdesi: 70 -> 80
Robotun Tasarımına imu sensörünü ekledim ve test ettim.
Muhammed Seyyid tarafından 10 ay önce güncellendi
- Dosya frames_2025-05-09_10.00.45.pdf frames_2025-05-09_10.00.45.pdf eklendi
- Tamamlanma yüzdesi: 80 -> 90
Tasarıma genel iyileştirmeler yaptım hareketi daha esnek hale getirdim.
Muhammed Seyyid tarafından 10 ay önce güncellendi
Gerçek robot için urdf dosyalarını ve bağlantılarını düzenlemek için araştırmalar yaptım , ros2 control için gerekli uygulamaları yapmaktayım