Özellik #18
açıkLIDAR Simulasyonda Yerelleştirme ,Haritalandırma ,Navigasyon & Testleri
70%
Dosyalar
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abdurrahman Dincer tarafından 10 ay önce güncellendi
- Konu: LIDAR Simulasyon Çiftlik Haritalandırma & Testleri -> LIDAR Simulasyonda Yerelleştirme Haritalandırma & Testleri
Muhammed Seyyid tarafından 10 ay önce güncellendi
- Dosya ib_save.pgm ib_save.pgm eklendi
ilk tasarladığımız robotun haritada kaymalara neden olduğu için, ibold tasarımını entegre edene kadar Yerelleştirme ve Haritalandırma işlemlerine farklı bir robotla devam ediyorum.
Muhammed Seyyid tarafından 10 ay önce güncellendi
- Tamamlanma yüzdesi: 40 -> 50
Yerelleştirme ve Haritalandırma işlemlerini oluşturduğumuz haritada (çiftlik ortamı) gerçekleştirdik
Muhammed Seyyid tarafından 10 ay önce güncellendi
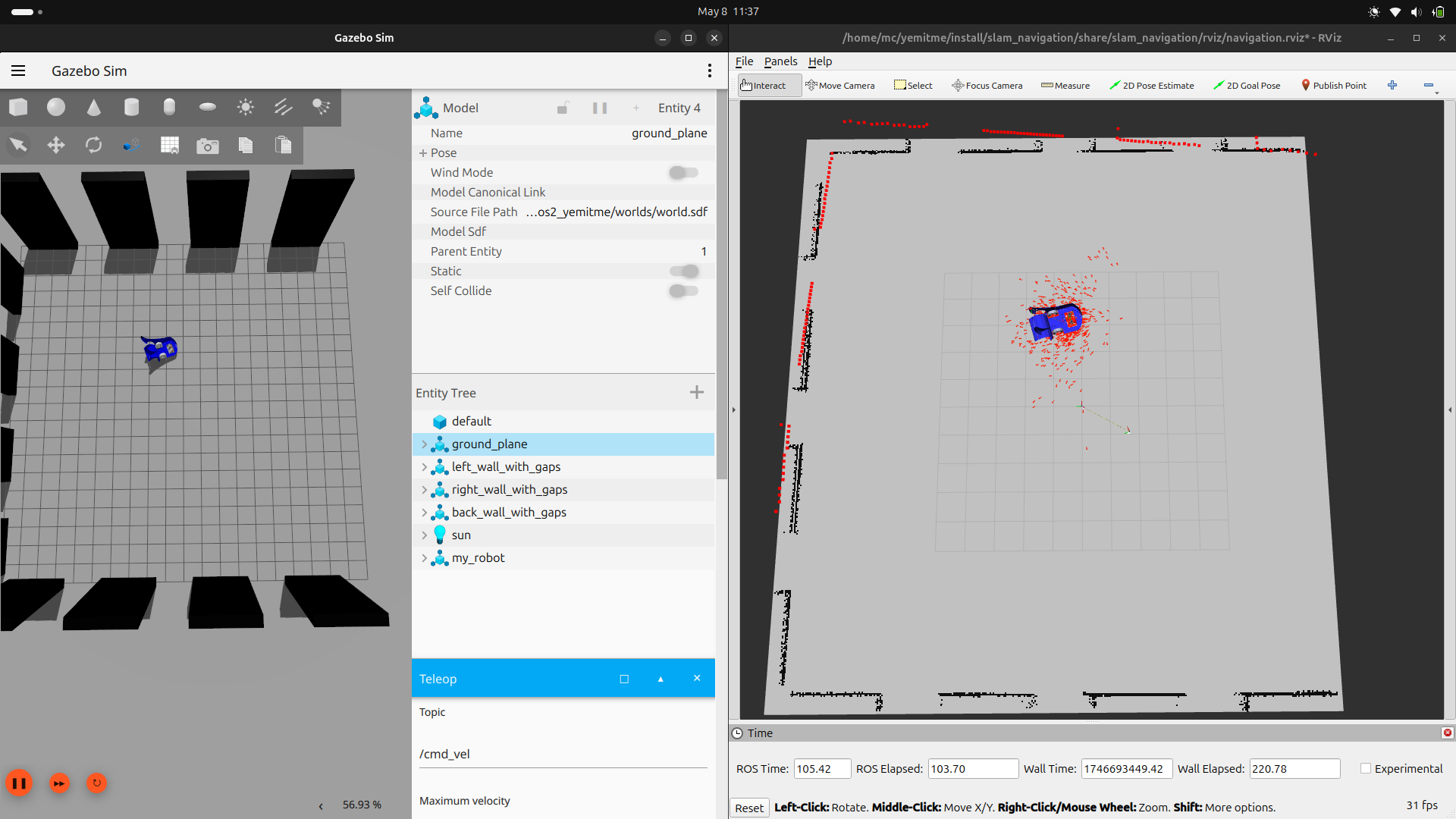
- Dosya Screenshot from 2025-05-08 11-37-31.png Screenshot from 2025-05-08 11-37-31.png eklendi
- Konu: LIDAR Simulasyonda Yerelleştirme Haritalandırma & Testleri -> LIDAR Simulasyonda Yerelleştirme ,Haritalandırma ,Navigasyon & Testleri
- Tamamlanma yüzdesi: 50 -> 60
Yemitme robotu gazebo ve rviz2 ortamlarında kullanarak haritalandırma ve yerelleştirme işlemlerini gerçekleştirdim, otonom bir şekilde hareketi için navigasyon işlemlerine başaldım.
Muhammed Seyyid tarafından 10 ay önce güncellendi
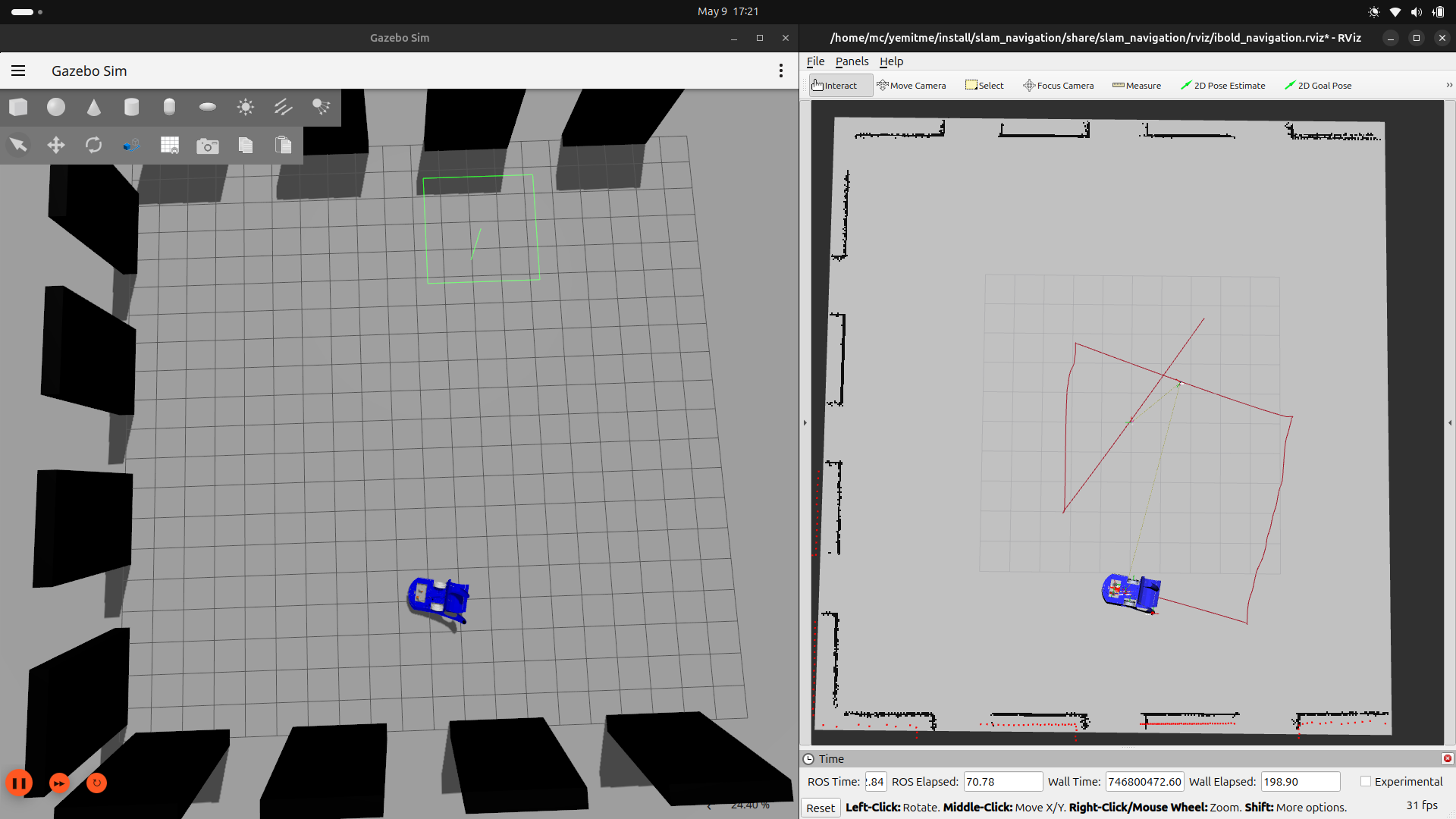
- Dosya Screenshot from 2025-05-09 17-21-16.png Screenshot from 2025-05-09 17-21-16.png eklendi
- Tamamlanma yüzdesi: 60 -> 70
Yerelleştirmede oluşan hataları giderdim ve genel iyileştirmeler uyguladım, haritalandırma işlemini birden fazla kez yaptım navigasyon testleri için farklı farklı senaryoları test ettim, otonom hareketi bir noktaya veya çoklu noktalarada testler gerçekleştirdim haritanın kaymalarını minimum dereceye indirgedim,gazebodan gelen robotun konumunu en yakın şekilde rviz2 ye eşzamanlı bir şekilde çalışabilmesi için ekf algoritmasını ekleyip verimliliğini test ettim.
Muhammed Seyyid tarafından 10 ay önce güncellendi
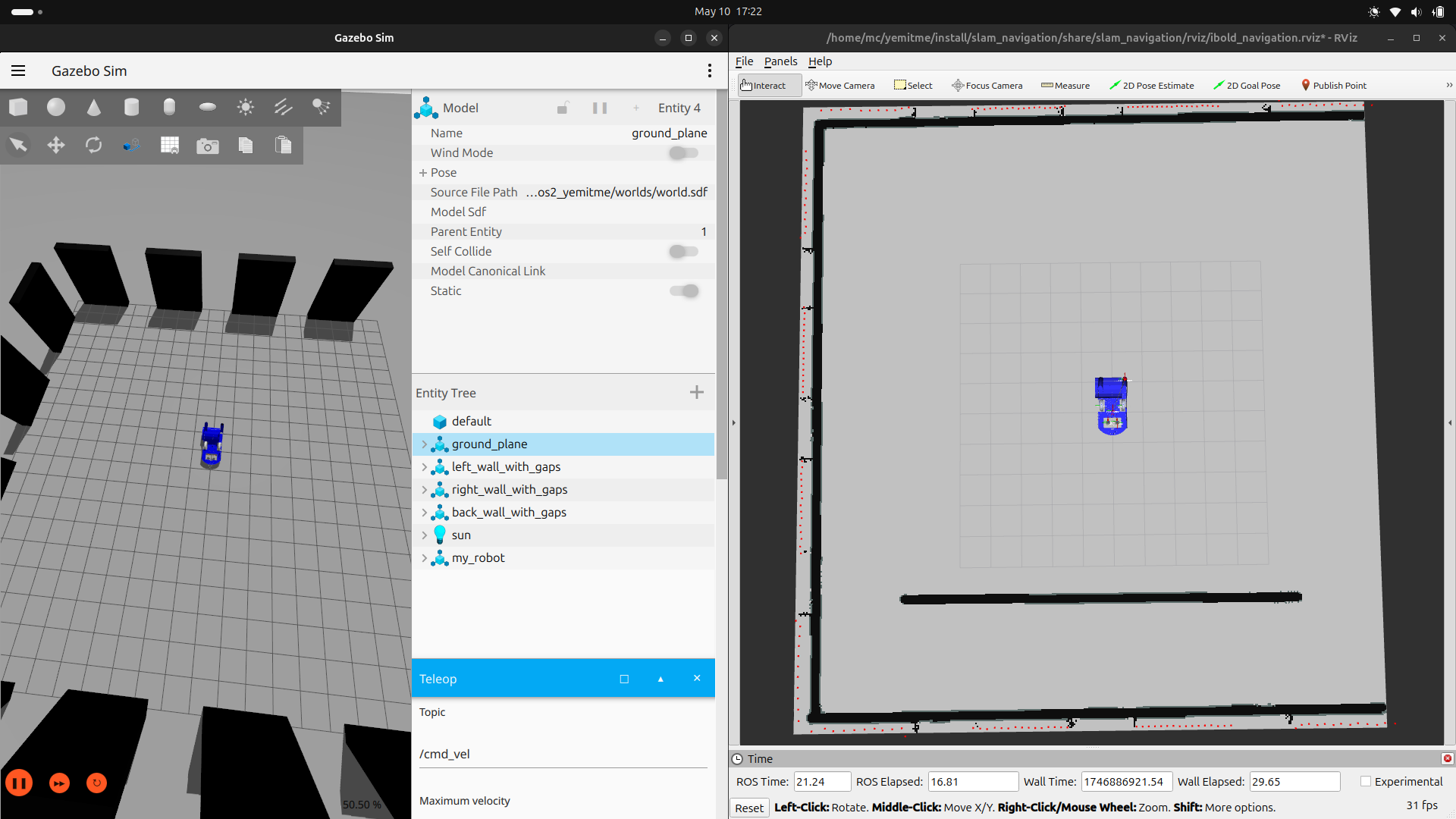
Rviz2'deki haritadaki duvar boşluklarını kapatarak duvar takibi için hazırlık yaptım. Haritaya, engelden kaçınmayı iyileştirmek ve dönüş davranışını test etmek amacıyla sahte bir çizgi ekledim. Dönüş sırasındaki hataları giderdim, böylece robot daha dikkatli ve esnek dönüşler yapabiliyor. Ayrıca, waypoint algoritmasıyla robotun haritada dikdörtgen güzergahta hareketini test edip iyileştirdim ve gelecekte kullanmayı planladığımız duvar takibi algoritmalarını araştırdım.
Muhammed Seyyid tarafından 10 ay önce güncellendi
Genel bir duvar takip algoritmalarının araştırmasını yoğun bir şekilde yaptım, farklı farklı algoritmaları denemeye çalıştım. Kendim bir duvar takip scriptini yazdım fakat düzgün bir şekilde duvar tespiti ardından takibinin görevlerini başaramadı. Bulunan algoritmaların çoğu lidar kullanarak sadece Gazebo için bir duvar takip işlemini yapmaktadır. Bizim amacımız RViz'deki daha önce mapping yaparak kaydettiğimiz ve duvarların arasındaki boşlukları kapattığımız haritanın duvarlarını algılayıp takip etmesi. Bu duvar takip konusunun başındayız, daha araştırılması ve geliştirilmesi gerekmektedir. Navigation YAML dosyasındaki behavior server'e yol takip plugini ekledim fakat o işlem de başarısız oldu.
Yol üzerindeki belirli noktaları hedef olarak waypoint dediğimiz işlemlerini gerçekleştirdim fakat her ne kadar başarılı olursa olsun duvar takibi çiftlik için şarttır.
Muhammed Seyyid tarafından 10 ay önce güncellendi
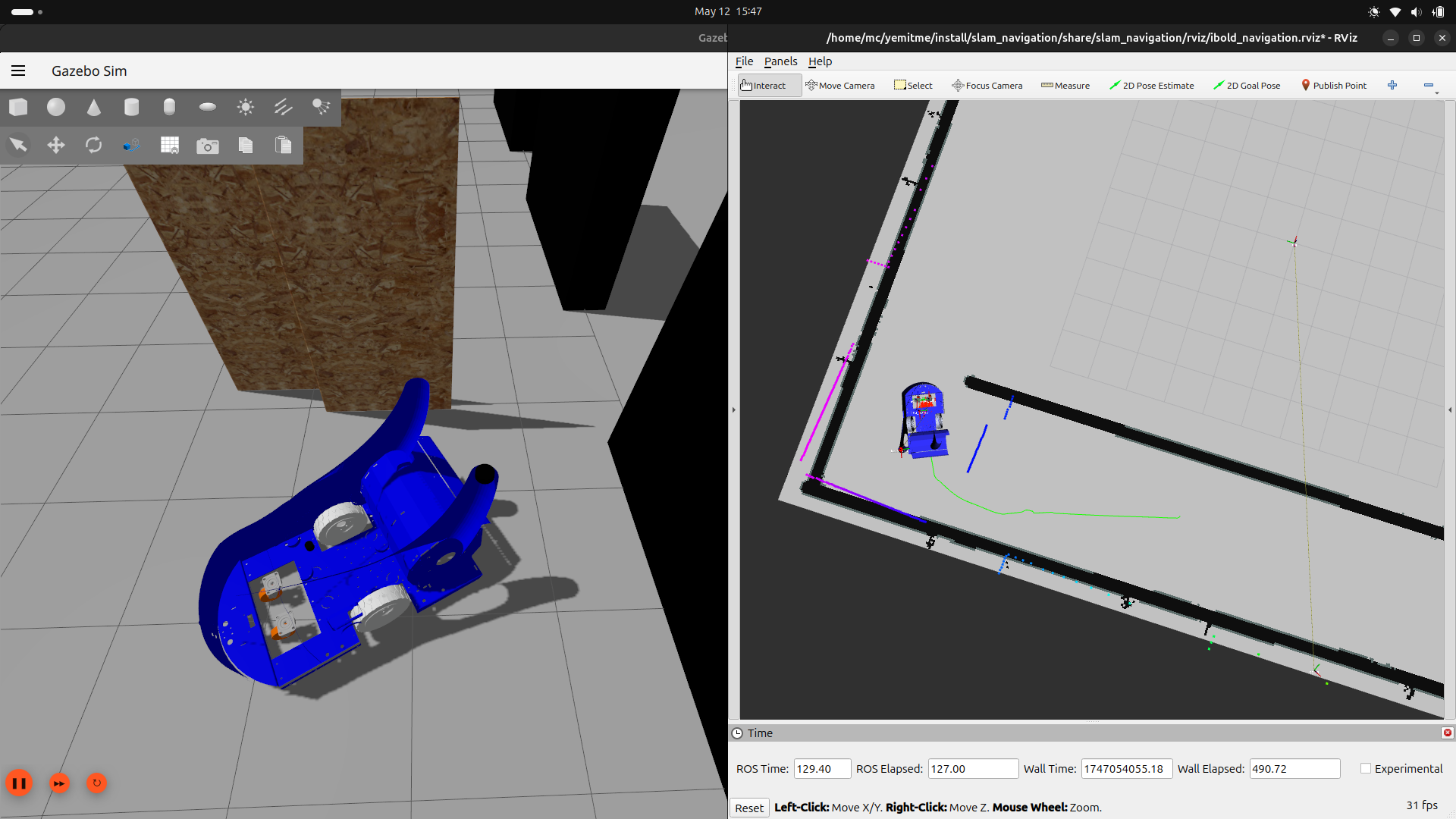
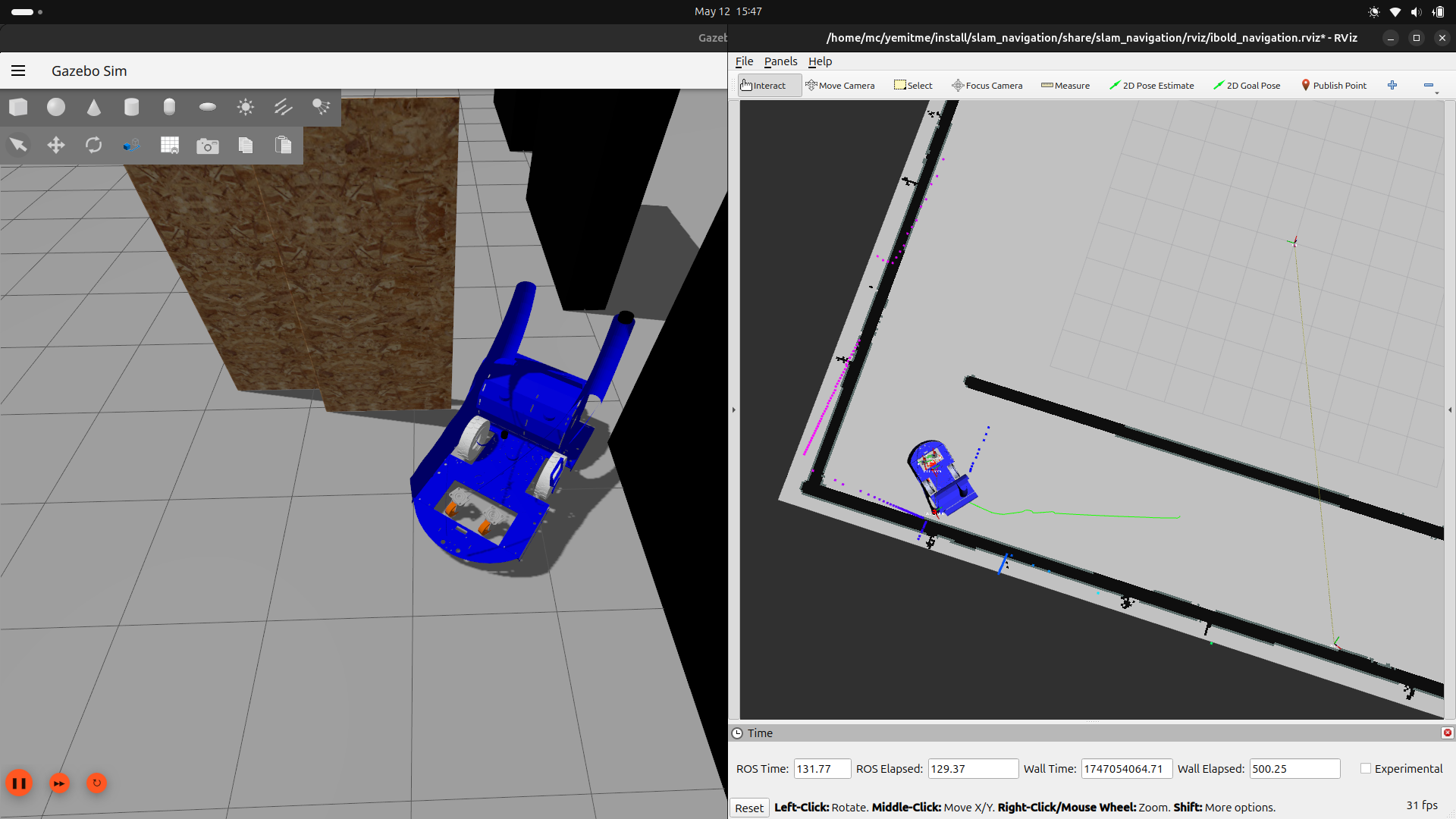
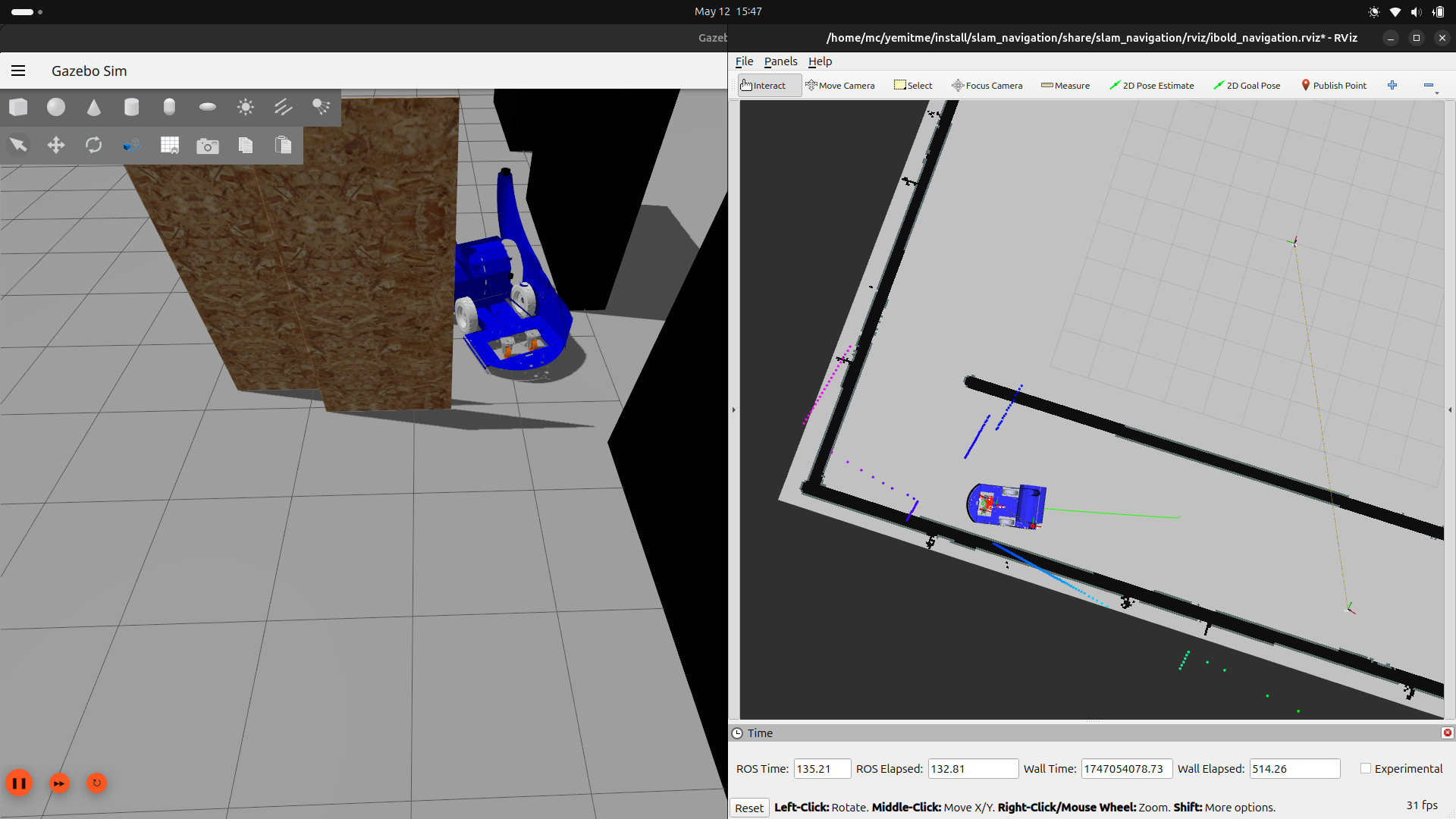
- Dosya Screenshot from 2025-05-12 15-47-37.png Screenshot from 2025-05-12 15-47-37.png eklendi
- Dosya Screenshot from 2025-05-12 15-47-46.png Screenshot from 2025-05-12 15-47-46.png eklendi
- Dosya Screenshot from 2025-05-12 15-48-00.png Screenshot from 2025-05-12 15-48-00.png eklendi
Navigasyonun dar alanlardan engellerin arasından geçişlerinin verimliğini arttırdım farklı farklı testlerini gerçekleştirdim , aynı zamanda aniden haritaya engelleri robotun önüne koydum ve bu konuda testlerin başarı oranı yüksektir .
Muhammed Seyyid tarafından 10 ay önce güncellendi
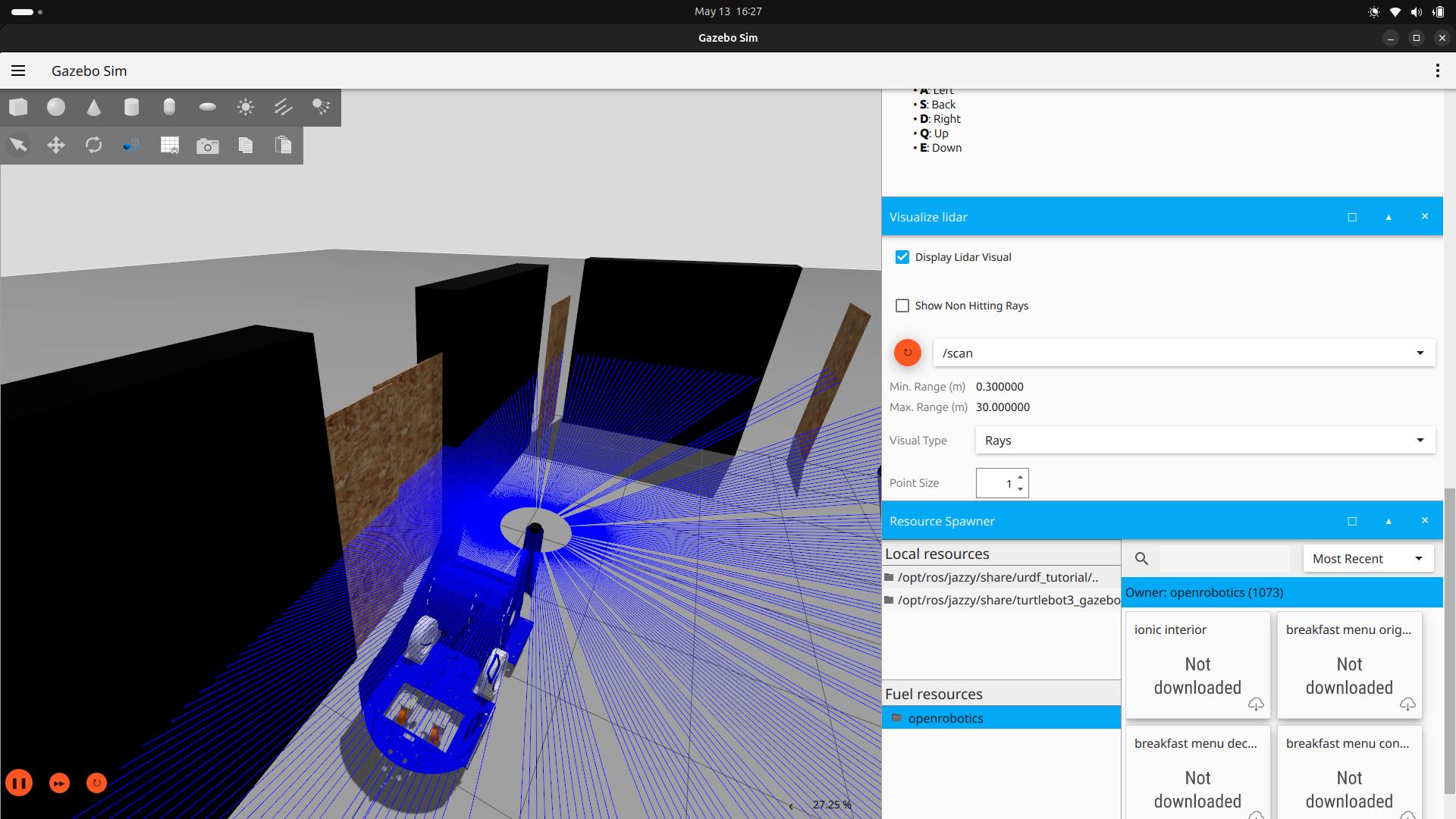
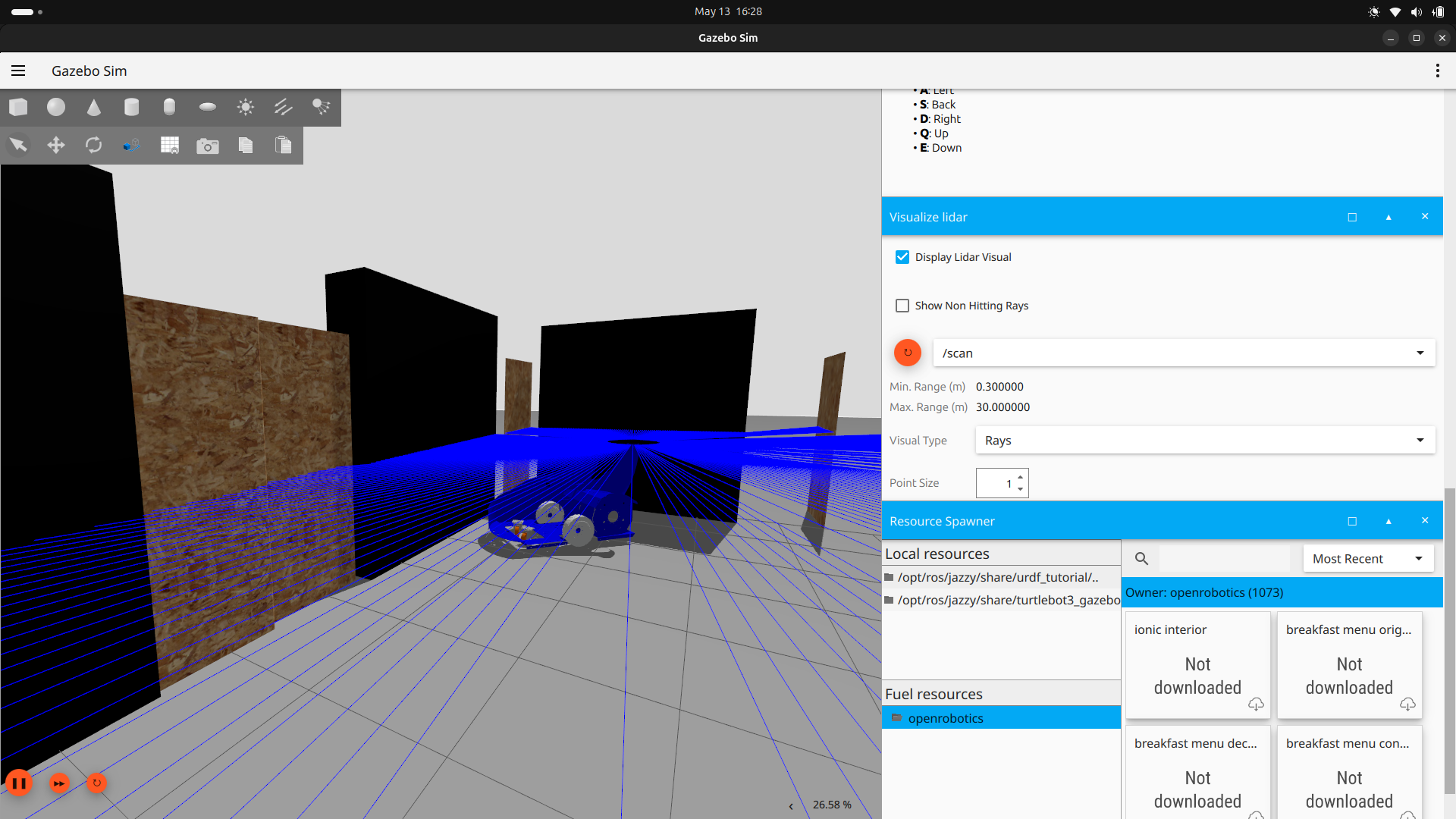
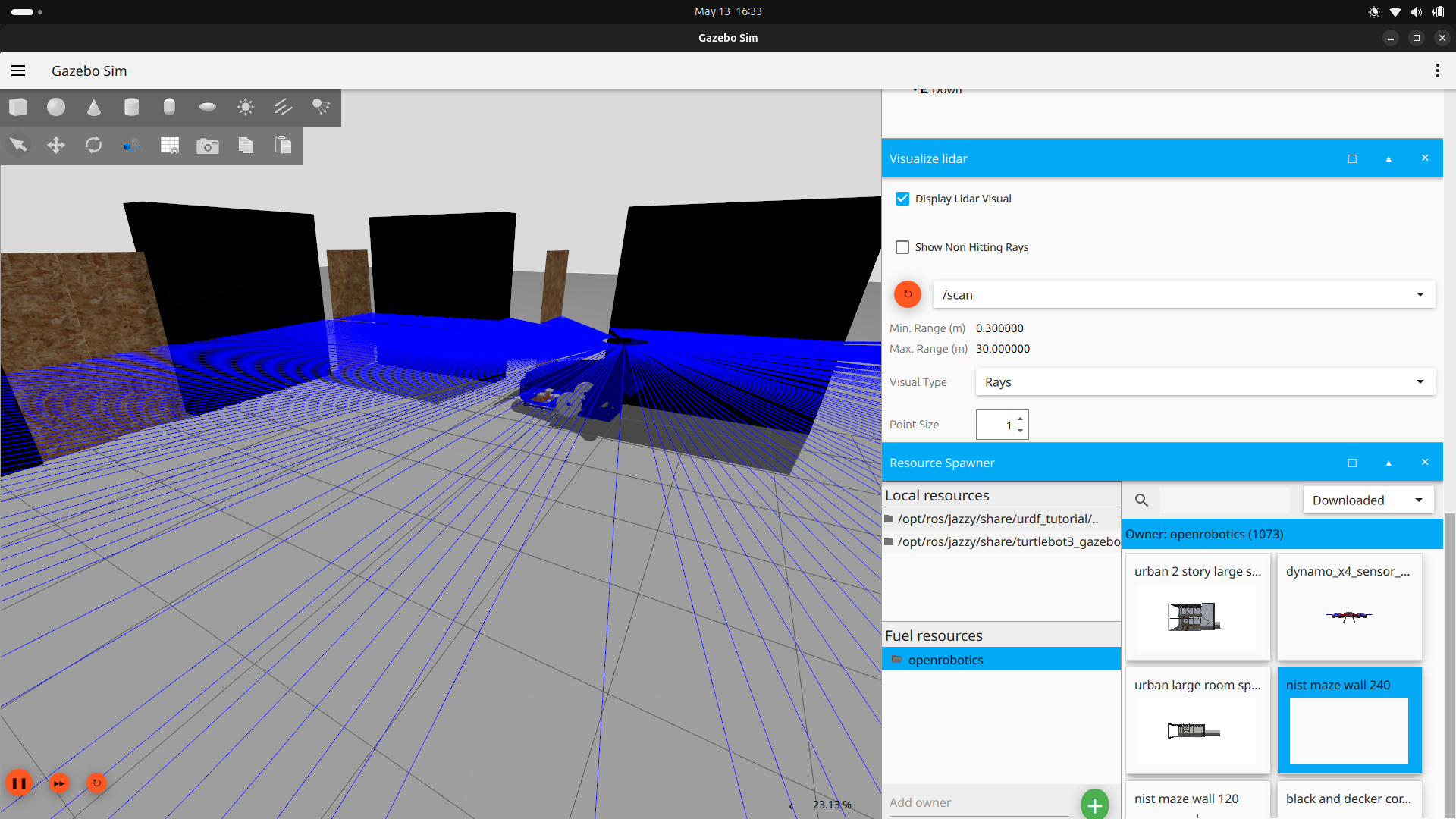
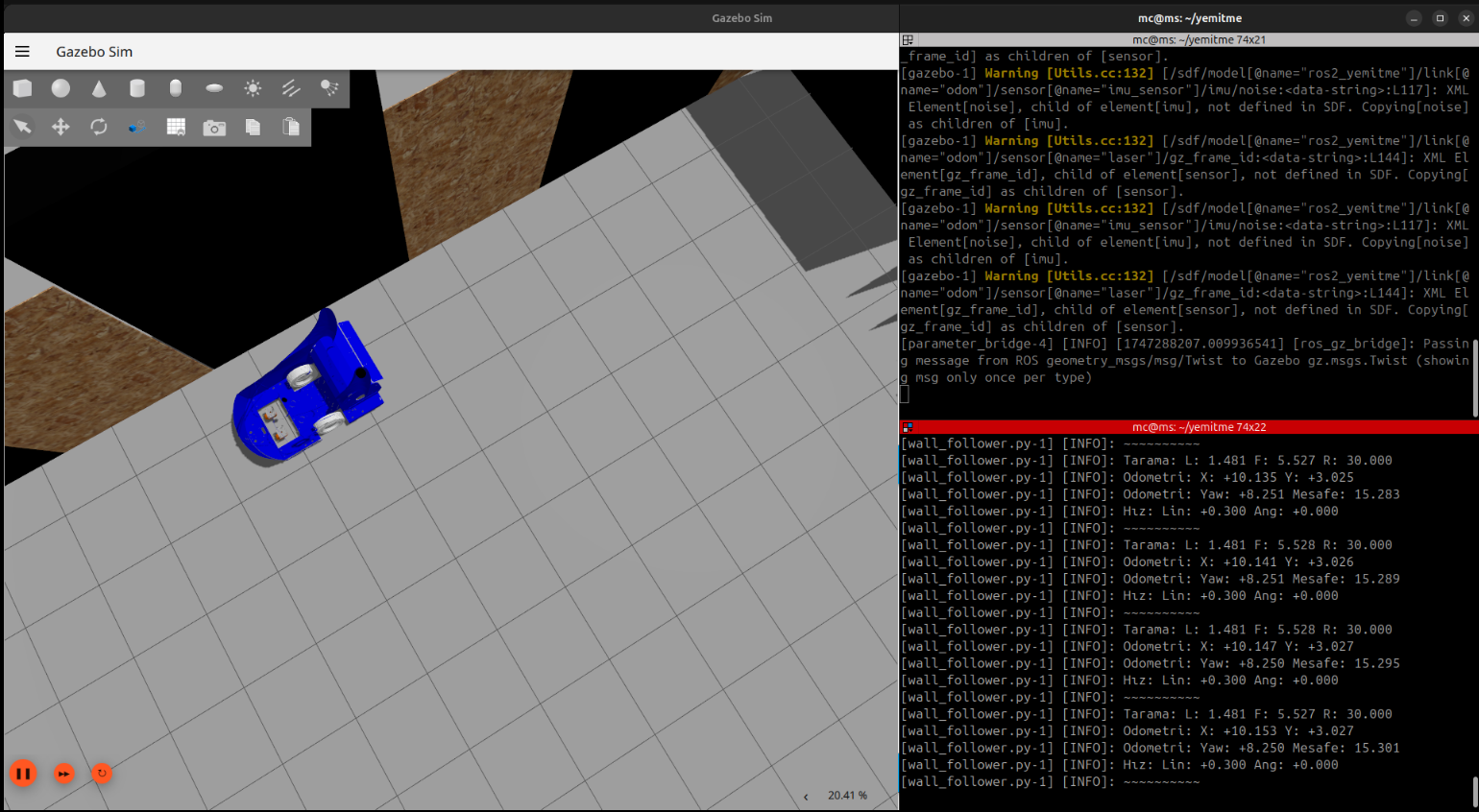
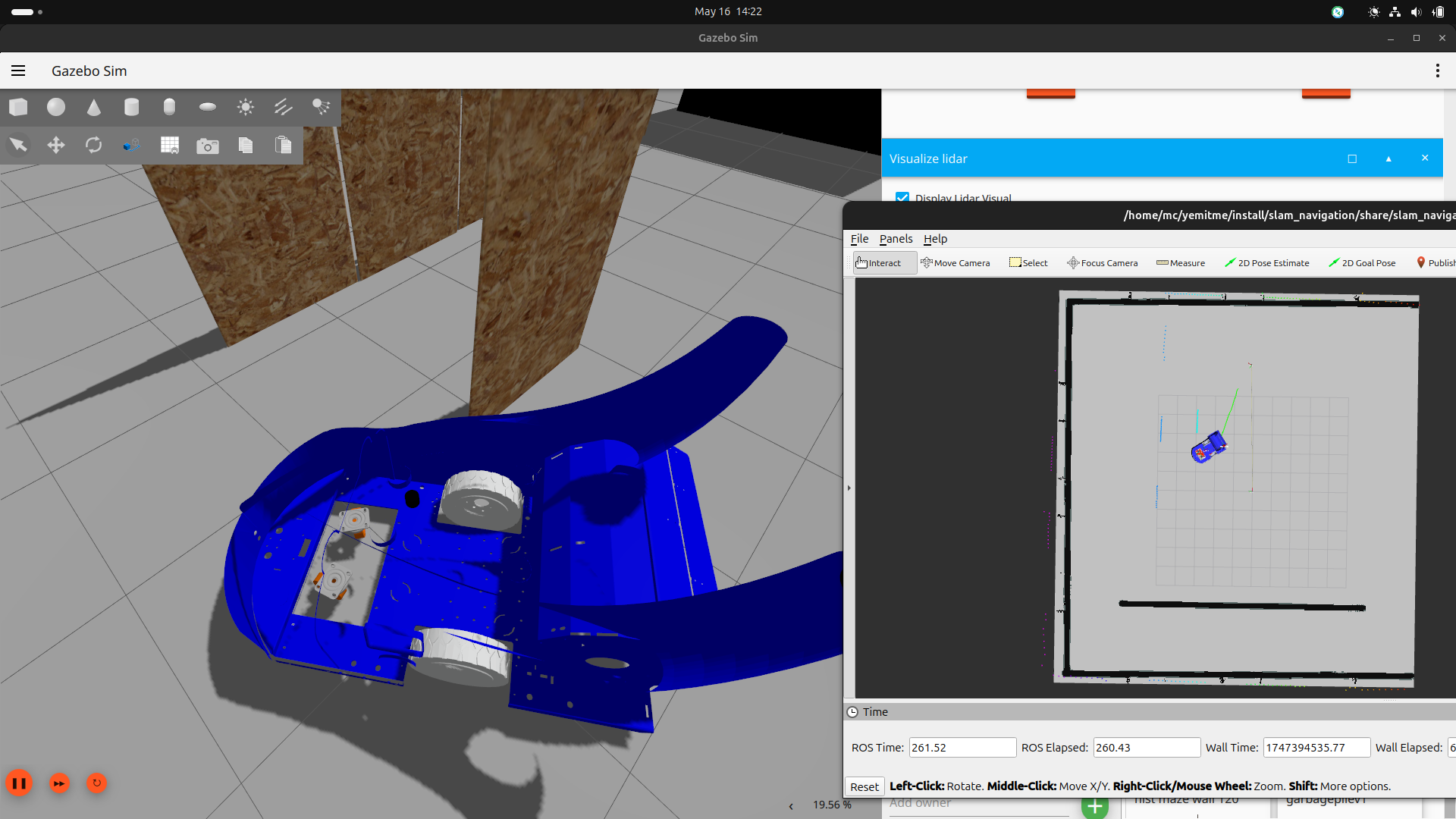
- Dosya Screenshot from 2025-05-13 16-27-57.png Screenshot from 2025-05-13 16-27-57.png eklendi
- Dosya Screenshot from 2025-05-13 16-28-55.png Screenshot from 2025-05-13 16-28-55.png eklendi
- Dosya Screenshot from 2025-05-13 16-33-39.png Screenshot from 2025-05-13 16-33-39.png eklendi
Gazebo'da robotun lidarıyla duvar algılama ve takip algoritması geliştirip projeye entegre ettim. Harita ve robotun lidar konumuna göre özelleştirmeler yaparak hataları minimize ettim, Robotu düz yolda ve dönüşlerde farklı farklı senaryolarda test ettim.
Muhammed Seyyid tarafından 10 ay önce güncellendi
Duvar takibi için araştırmalar yaptım, wall follower algoritmasının kontrol fonksiyonunda değişiklikler yaptım ve farklı senaryoları test ettim. Düzenlemeler daha sğlam çalışması için yapıldı ve daha da geliştirilmesi gerekiyor.
Muhammed Seyyid tarafından 10 ay önce güncellendi
Duvar takibinde dönüş esnekliği için iyileştirmeler yaptım verimliliğini artırıp test ettim, duvar takibini daha iyi hale getirdim.
Muhammed Seyyid tarafından 10 ay önce güncellendi
Engelden kaçınma testlerini gerçekleştirdim.
Muhammed Seyyid tarafından 10 ay önce güncellendi
Navigasyondaki kullanmakta olduğumuz ve kullanacağımız farklı farklı kavramları yakından inceleyip işimize yarayacak olan waypoint için tekrar araştırmalar yaptım, lidar verisiyle kullanmakta olduğumuz duvar takip algoritmasının yerine pgm haritasının engellerini (siyah pikseller) referans alarak duvar takibi için araştırmalar yaptım ve bazı denemelere başladım.
robotumuzda hem nokta takibi hemde duvar takibi birlikte eşzamanlı hibrit bir şekilde kullanmayı planlıyorum , En güvenli gezinme işlemini yapmaya gayret ediyorum.